피드백회로 단원의 11번째 진도이자 및 주파수 보상 챕터의 네번째 진도이다.
(이 글은 상급 내용도 다루고 있다. 이 둘의 내용에 대해서 구분선을 놓을테니 어려우면 읽지 않아도 좋다)
내용이 어렵다면 아래 내용을 읽어보시길 바랍니다.
2022.01.24 - [전공(Major)/전자회로와 아날로그 회로설계] - 피드백 회로의 안정조건(Stability Condition of Feedback circuit)
피드백 회로의 안정조건(Stability Condition of Feedback circuit)
이 글은 피드백 챕터의 10번째 진도이면서 주파수 안정 및 보상의 두번째 진도입니다. 이전 진도 2022.01.19 - [전공(Major)/전자회로와 아날로그 회로설계] - 피드백 회로의 불안정성 문제와 바크하우
doctorinformationgs.tistory.com
이전 진도를 간략하게 보도록 하자
아래 복습 식 1과 같이 바크하우젠 조건을 만족 시키면 피드백 시스템은 발진하게 된다.

이를 이득 교차 주파수와 위상 교차 주파수를 통해 보면 복습 그림 1과 같다.

따라서 발진(Oscillation)을 피하기 위해 이득 교차 주파수가(ωGX)가 위상 교차 주파수(ωPX)보다 낮아야 함을 알 수 있다.

위 두 위상이 얼마나 많이 차이나야 하는가에 대답은 위상 마진(Phase Margin)에서 설명하도록 한다.
위상 마진(or 위상 여유, Phase Margin, PM)
위상 마진에 대한 개념을 이해하기 위해서는 아래 그림 2를 통해 예시를 보도록 하자.

그림 2는 두 주파수(이득 교차와 위상 교차)의 차이를 보여주고 있는데 이 둘의 차이는 양방향 화살표를 통해 보여주고 있다.
식 2에서 두 주파수(이득 교차와 위상 교차)의 차이가 그리 크지 않는 경우 오랫동안 진동하다가 나중에 안정적인 상태로 간다는 것을 알려주며 차이가 큰 경우 피드백 시스템이 안정적으로 동작하고 있음을 보여준다.
두 주파수의 차이는 피드백 시스템의 안정성의 양을 알려주는 척도이며 이를 위상 마진(or 위상 여유, Phase Margin, PM)이라 부른다.
해당 식은 아래 식 1과 같이 표현 가능하다.

조금 더 어려운 내용(생략 가능)
안정성을 유지하기 위해 루프 이득의 위상은 -180도를 넘기 전에 루프이득은 1로 떨어져 함을 그림 2에서 보았다.
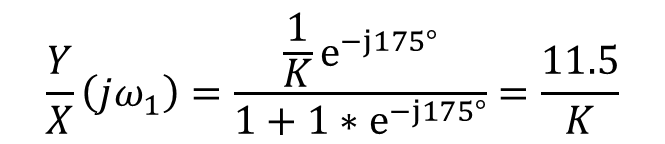
ωGX에서 위상이 -175° 인 극한 상황을 보도록 한다.
폐루프 시스템은 ωGX에서 KH(jω1)=1e^(-j175°) 이다 따라서 아래와 같이 쓸 수 있다.

폐루프 시스템은 아래와 같이 계산이 가능하다(ωGX, 오일러 참고)
이는 그림 3과 같이 표현이 가능하다
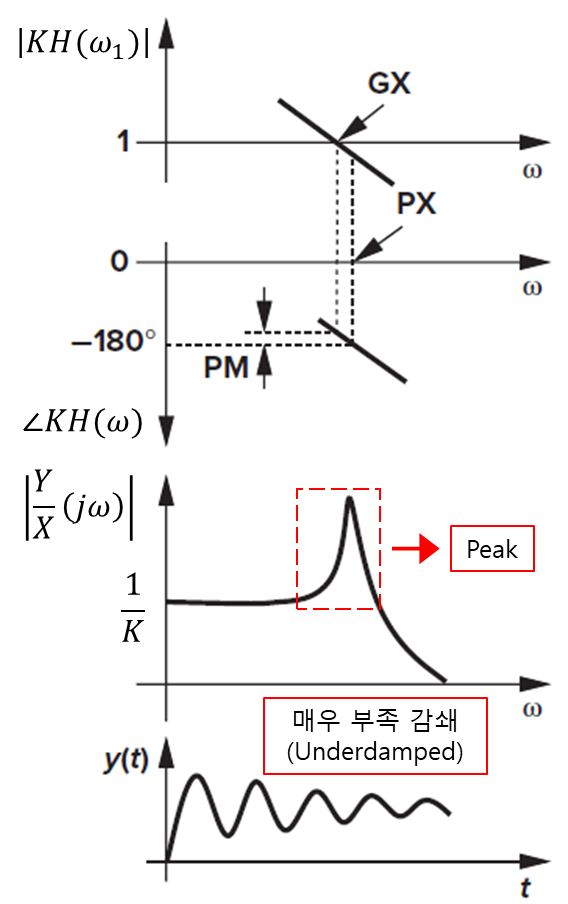
그림 3을 통해 폐루프 시스템의 주파수 응답은 ω=ω1에서 날카로운 피크를 가지는데 이는 폐루프 시스템은 발진에 가깝게 되며 time-domain에서 출력 y(t)에서는 underdamped의 형태를 가짐을 알 수 있다.
따라서 그림 2에서 Margin을 충분하게 가져야 함을 다시 상기할 수 있다.
조금 어려운 내용 부분 끝
어느정도의 여유가 적합한지에 대해 알아보도록 한다.
식 1을 통해 PM은 45° 60° 90° 에 대한 그래프를 알 수 있다.
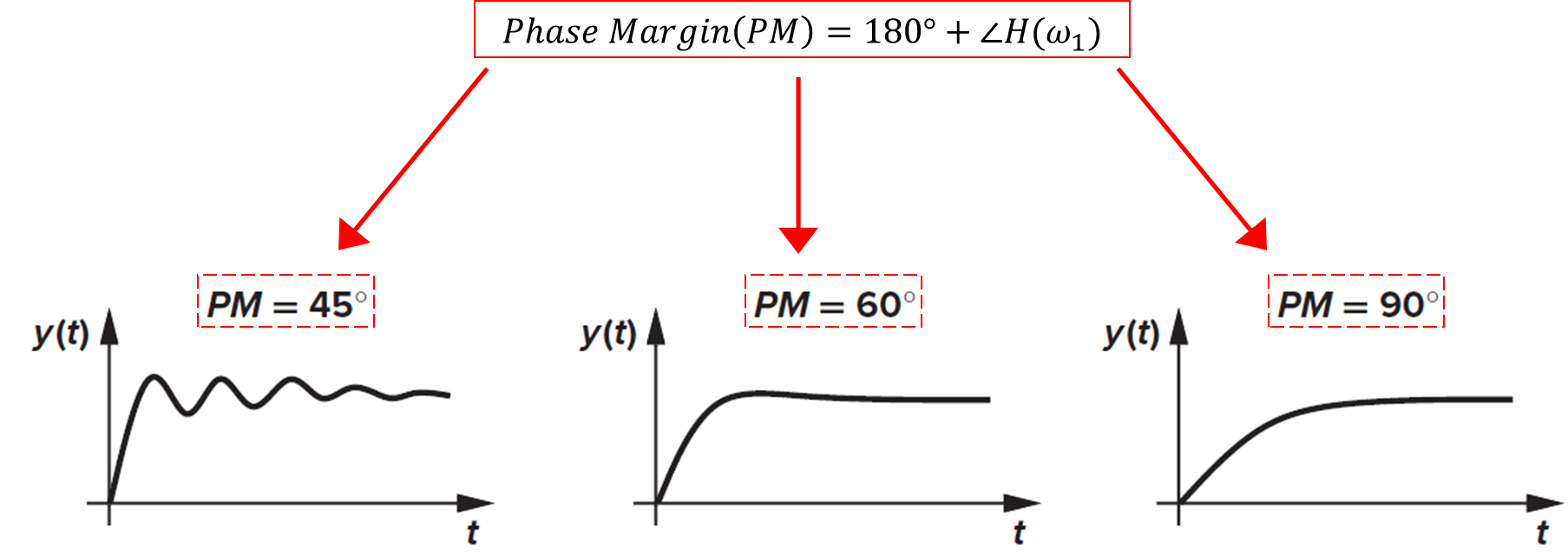
PM이 높을 수록 안정적인 값을 가지지만 PM이 60° 를 일반적인 최적의 값으로 보며 PM이 커질수록 시간 응답이 늦어짐을 확인하자.
(조금 더 어렵게 이해하고 싶으면 식 3의 방법으로 계산해보면 알 수 있다.)
(조금 더 어려운 내용 생략 가능)
PM과 UGF의 관계 및 1 Stage and 2 Stage amp 예시
UGF는 Unity Gain Freq이며 이득이 1이 되는 지점이다 따라서 UGF=ω1 이며, 편의상 UGF라 적는다.
이중 극점 시스템에서의 위상 마진
이중 극점 시스템에서 전달함수는 아래와 같다.
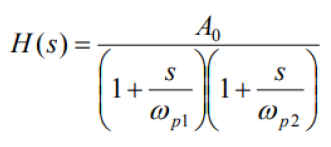
식 4에서 ωp1<<ωp2일 일 때 충분히 넓게 극점들이 분리된다. 따라서
1) UGF=ωp2 (in rad/s) 일 때 위상 마진은 45° 이다.
식 1을 통해 계산하게 되면 두번째 극점에서 위상은 -135° 이기 때문이다.
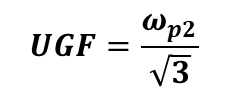
2) UGF=ωp2/(sqrt(3)) (in rad/s) 일 때 위상 마진은 60° 이다.
식 1을 통해 계산하게 되면 위상 마진이 60° 이면 ωGX는 120° 임을 알 수 있다.
식 4에서 첫번째 극점에서 -90° 의 변화가 생겼고, 두번째 극점에서 -30° 떨어질 때 임을 알 수 있는데 이를 복소수로 표현하게 되면 아래와 같다.
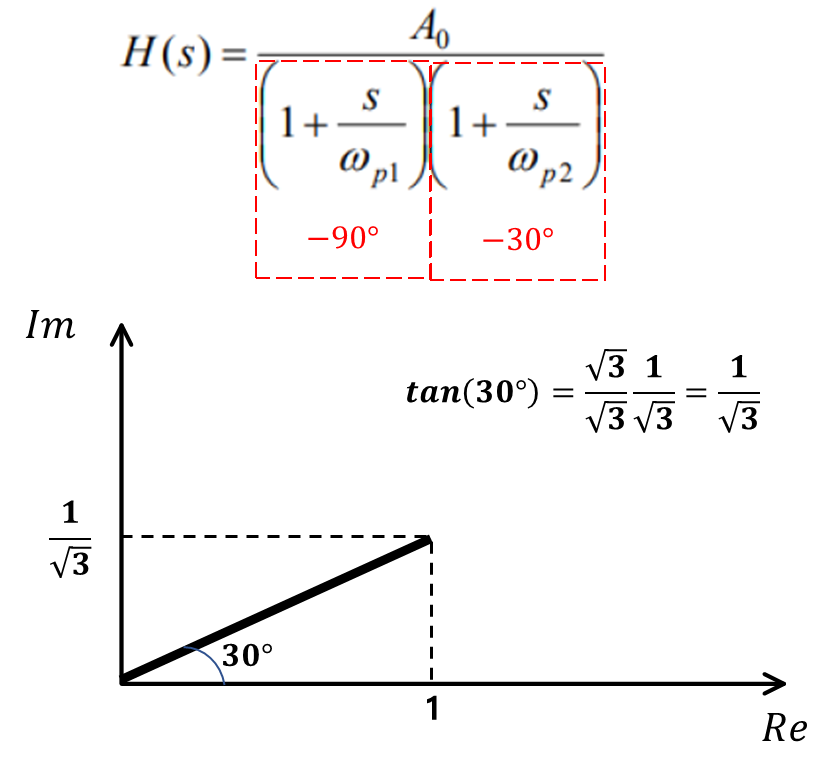
따라서 UGF는 아래와 같다.
1 & 2 Stage amp 예시
아래 그림을 보도록 하자
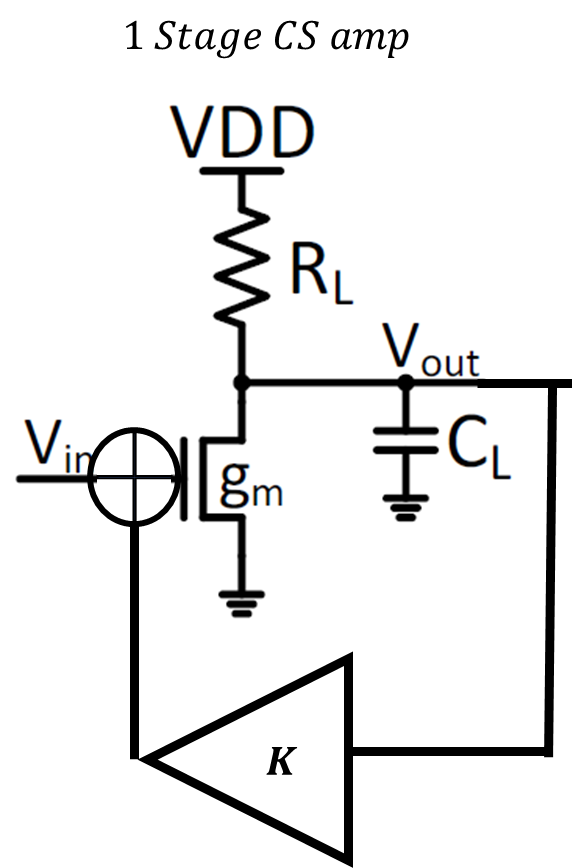
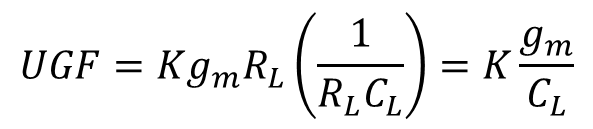
1단 증폭기의 루프이득은 아래와 같다.

UGF는 아래와 같다.
다음 그림은 2단 증폭기 이다.
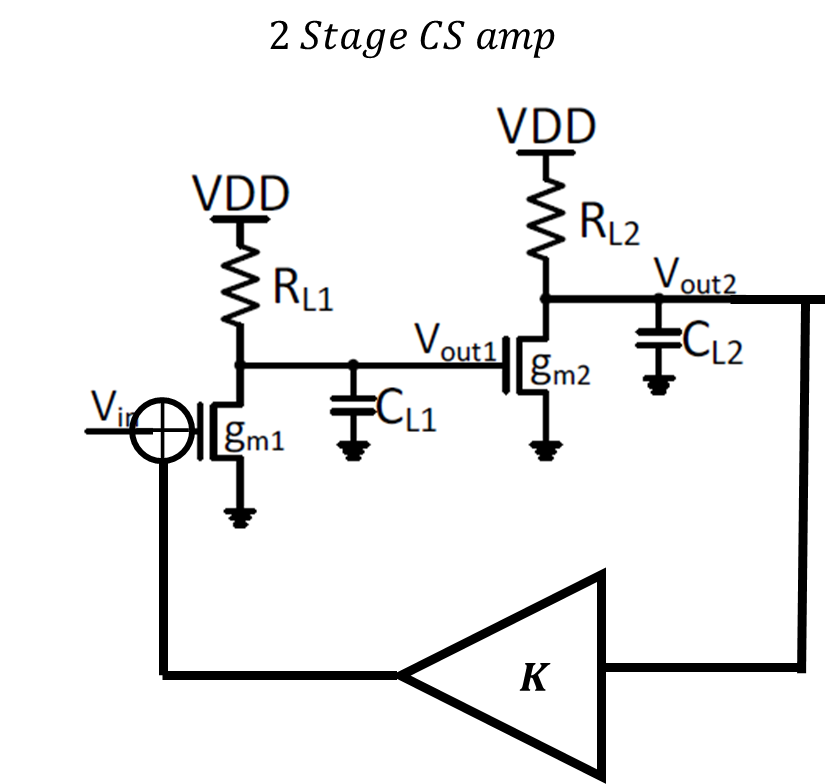
Bode Plot을 해보면 아래 그림과 같음을 알 수 있다.
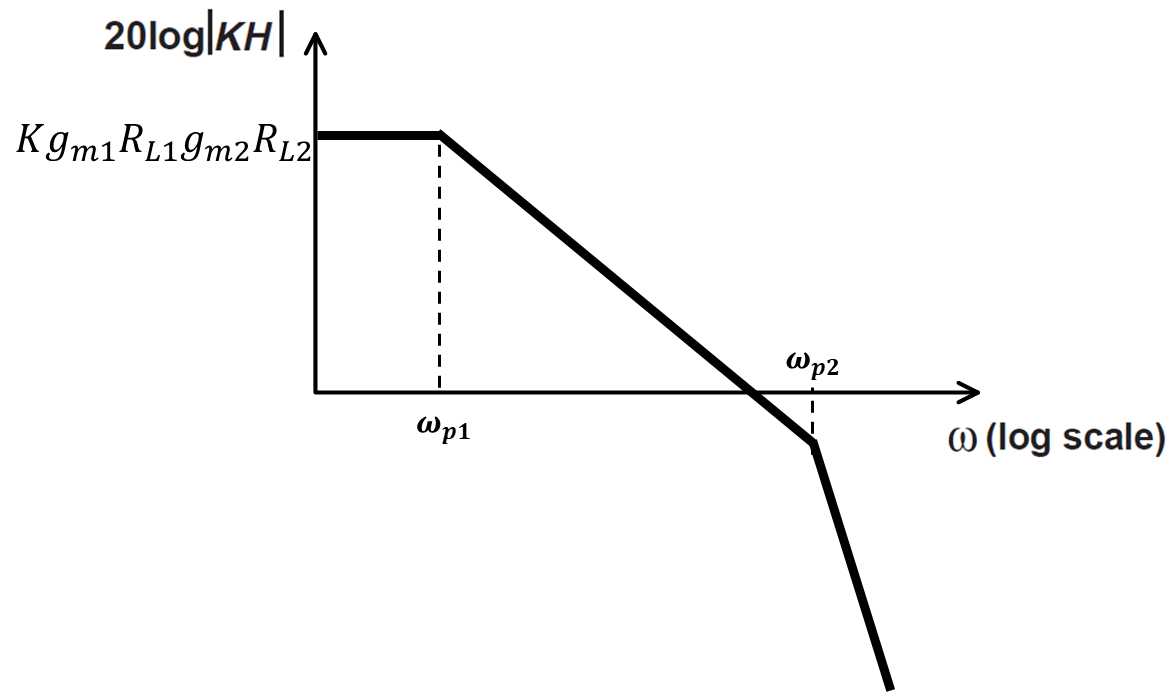
UGF는 저주파 이득과 극점1(ωp1)임을 알 수 있으며 UGF는 아래와 같다.

위에서 언급했듯이 만약
1) UGF=ωp2 (in rad/s) 일 때 위상 마진은 45° 인 경우
부하 캐패시터인(CL1)을 고려하고UGF=ωp2 이므로 다음과 같이 쓸 수 있다.
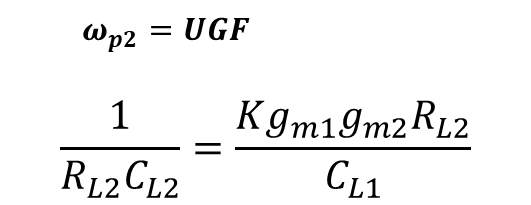
따라서 CL1 값은 아래와 같이 정할 수 있다.

2) UGF=ωp2/(sqrt(3)) (in rad/s) 일 때 위상 마진은 60° 인 경우
이는 그림 5에서 이미 언급되었으므로 아래와 같이 됨을 알 수 있다.
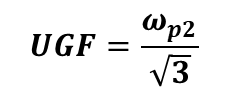
식 11을 통해 PM=60 인경우 부하 커패시터(CL1)은 아래와 같다.

전자회로 2 과정을 학습하셨습니다.
아래 링크를 통해 다음 진도와 전자회로 2의 모든 내용을 확인하실 수 있습니다.
2022.01.12 - [전공(Major)/전자회로 2 과정] - 전자회로 2 커리큘럼
전자회로 2 커리큘럼
전자회로 2 커리큘럼입니다. 전자회로 2에 대한 간략한 설명은 아래와 같습니다. 전자회로 1에서 배웠던 능동소자(Diode, BJT, MOSFET)에 대해 학습했으며 그에 대한 다이오드 회로 및 단일 증폭기인
doctorinformationgs.tistory.com




댓글